传感器选择与布置
乘用车自动驾驶发展,根据应用的场景不同可分为:行车自动驾驶和泊车自动驾驶。
由于行车和泊车运行场景有很大不同,在传感器选择上很大区别。同时,需要综合考虑各类型传感器性能、成本、布置位置等因素。
1)传感器选择
行车主要运行工况为中高速,需要选用检测距离较远的传感器。目前应用传感器主要有:摄像头、毫米波雷达、激光雷达。
泊车运行在低速,一般选用检测距离10m内传感器。目前应用传感器主要有:超声波雷达、鱼眼摄像头。
在数据处理上进行融合,充分利用各类型传感器优势。
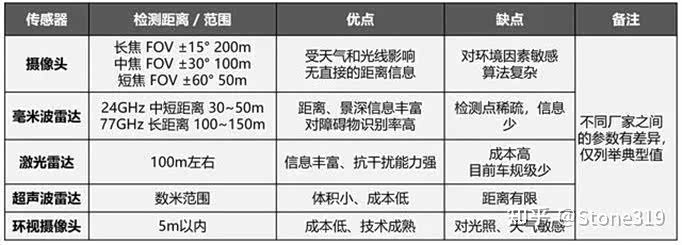
车载环境感知传感器概况(来源网络)
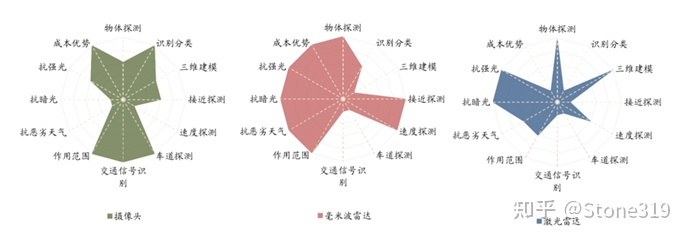
自动驾驶行车系统传感器综合比较(来源网络)
2)传感器布置
车辆周边区域,可以大致划分为4大区域:正前区域A、侧前区域B、侧向区域C、后向区域D和侧后区域E(如下图):
-对于行车自动驾驶,A区域是重中之重,布置传感器也最为丰富。最远感知距离一般需要200m以上;其次是侧后E区域和测前B区域,用于变道和横穿等场景,最远感知距离一般需要80m以上。
-对于泊车自动驾驶,需要对车辆四周全覆盖。由于泊车时速度一般在10km/h内,感知距离范围在10m内就能满足要求。
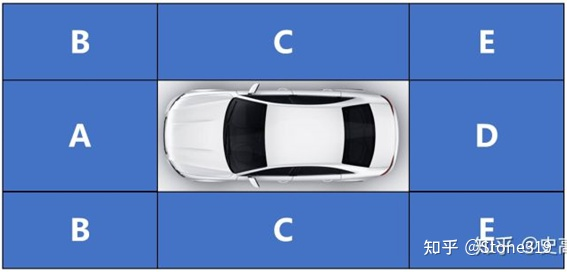
传感器布置位置(来源网络)
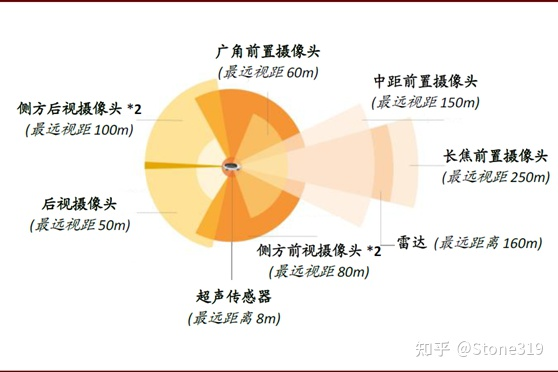
特斯拉传感器方案(来源网络)