传感器方案发展阶段
1)行车传感器方案
行车自动驾驶发展可大致分三个阶段:单车道自动驾驶辅助、多车道自动驾驶辅助和点对点自动导航驾驶。
-单车道自动驾驶辅助:通过前视单目摄像头或前向毫米波雷达,可实现自动紧急制动AEB和自适应巡航ACC功能。毫米波雷达的优势在于对车辆速度的探测,而摄像头的优势在于识别车道线和对障碍物分类。前视单目摄像头和前向毫米波雷达结合一起应用,可实现单车道高速驾驶辅助HWA和交通拥堵辅助TJA功能。
-多车道自动驾驶辅助:要实现变道辅助,需要增加传感器对邻道环境进行感知。通常在车尾部两角各增加1个毫米波雷达,实现对车辆侧后环境感知。进一步,可增加车前毫米波角雷达,拓展侧前环境感知,实现路口辅助JA、紧急车道保持ELK、紧急转向辅助ESA等功能。
-点对点自动导航驾驶:要实现从一个点到另个点全自动驾驶,需要对车辆周边环境进行全方位感知,同时增加冗余。一般需要前视增加激光雷达、侧视和后视增加摄像头和毫米波实现增强感知,同时,增加高精地图和惯性导航进行定位。
自动行车,目前发展到点对点自动导航驾驶阶段。主流传感器方案为:激光雷达x1~3+毫米波雷达x5~8+ADS摄像头x7~10。
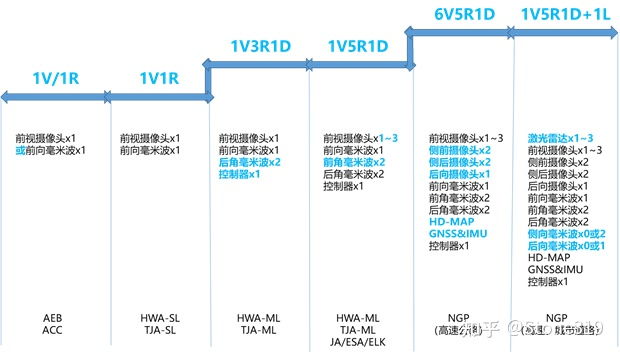
自动行车方案路线
2)泊车传感器方案
泊车自动驾驶发展大致可分四个阶段:倒车辅助、自动泊车、记忆泊车和代客泊车。
-倒车辅助:通过倒车雷达和全景影像,实现倒车时碰撞预警和提供车辆四周环境影像辅助倒车。倒车雷达,一般车前、车后各安装4颗超声波雷达;全景影像,一般在车辆四周共安装4颗鱼眼摄像头。
-自动泊车:在倒车雷达基础上,车侧两边各增加2个长距超声波泊车雷达识别车位,达到共12颗超声波雷达,实现自动泊车。进一步,可与全景摄像头融合,实现对线性车位感知,增强实现自动泊车场景。也可与钥匙、手机APP结合,实现在驾驶员监控下的遥控泊车功能。
-记忆泊车:实现100m内寻迹泊车。不需要额外加装传感器,但泊车系统需要融合前视行车摄像头数据,通过VSLAM构建地图。进一步,可跟后视行车摄像头数据融合,实现寻迹倒车功能。
-代客泊车:实现1km内自动泊车。需要增加高精地图和惯性导航定点,同时跟停车场系统结合,实现停车场内无人自动驾驶泊车。
自动泊车,目前发展到记忆泊车/代客泊车阶段,各厂家传感器方案都是采用超声波雷达x12+环视摄像头x4方案,同时,需要与行车传感器融合。
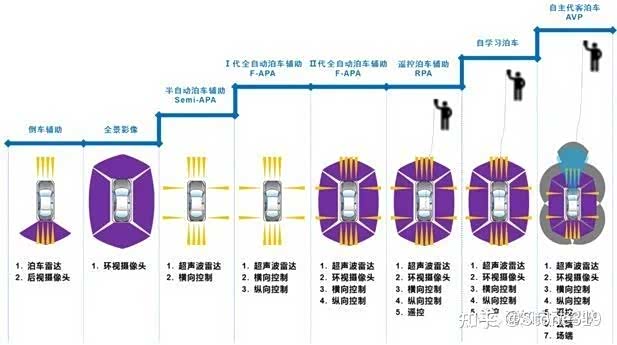
自动泊车方案路线(来源网络)