传感器技术发展与应用
1)摄像头
根据布置位置,车载摄像头可分为:前置摄像头(含ADS摄像头、行车记录仪、夜视、环视前置摄像头等)、侧置摄像头、后置摄像头和内置摄像头。
对于高阶自动驾驶,ADS摄像头一般为7~10颗。侧视和后视通常共5颗,差异主要在前视摄像头。
前视摄像头一般采用长焦+广角两摄像头方案。有的为了识别深度,采用双目立体摄像头方案,但对标定、算法要求比较高。华为在极狐上采用的是长焦+广角+双目共4颗摄像头方案。
另外,前视摄像头一般集成图像采集和视觉处理,直接输出目标物。随着目前计算集中化,摄像头有向“只采集不计算”方向发展趋势:把计算部分放到域控制器中。如特斯拉前视摄像头,未配置SoC、MCU等计算模块。
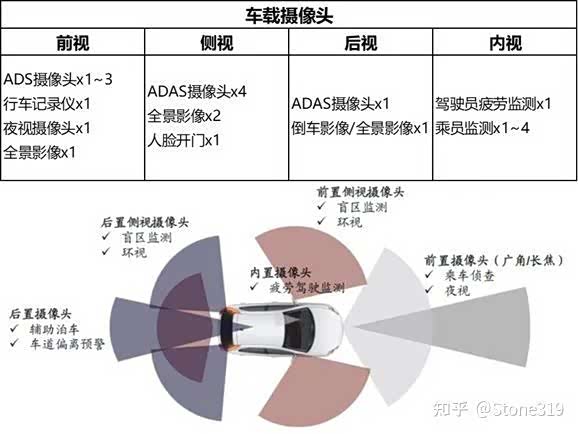
车载摄像头布置位置(来源网络)

极狐-华为前视摄像头(来源网络)

Tesla与ZF前视摄像头对比(来源网络)
2)毫米波雷达
毫米波雷达最大优势是对车辆速度的识别,一般是车辆前视区域A必备传感器。安装在车辆前后4角位置的毫米波角雷达,用于拓展多车道驾驶辅助功能。部分车型在高级自动驾驶上毫米波雷达应用已拓展到后视区域D和侧视区域C,如长城摩卡传感器,毫米波雷达搭载数量已达到8颗。
技术发展上,4D成像雷达具有:可实现“高度”探测、分辨率更高、可实现对静态障碍物分类等优势,主要集中在前视区域应用,达到类似低线数激光雷达效果。目前上汽R品牌-ES33已搭载了2颗采埃孚的4D毫米波雷达,安装在车辆前保险杠,探测距离超过300米。
另外,毫米波手势雷达、生命体征监测雷达也值得关注。目前车内监测主要以摄像头为主,但是摄像头会涉及到个人隐私问题,毫米波雷达则能够减少这个顾虑。森思泰克已开发出STA60-1手势雷达和STA79-4生命体征监测雷达。其中,STA79-4生命体征监测雷达,已在广汽蔚来合创007上搭载应用。
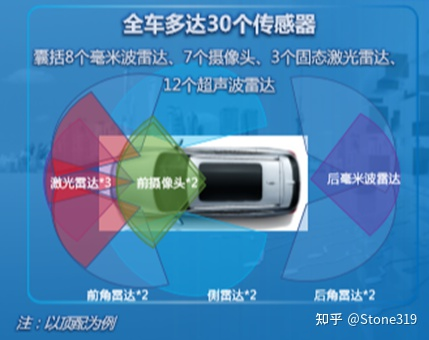
长城摩卡传感器方案(来源网络)

上汽R品牌-ES33 4D毫米波雷达(来源网络)

森思泰克 STA60-1手势雷达(来源网络)

森思泰克 STA79-4生命体征监测雷达(来源网络)
3)激光雷达
激光雷达应用,主要受制于成本。随着MEMS、纯固态技术的成熟,激光雷达价格有望发生大幅下降,而激光雷达价格下降促进激光雷达出货量提升将进一步为激光雷达带来规模效应促进其成本下降。
对于激光雷达三大核心零部件-激光发射器、激光探测器、扫描部件:
-短期受限于成本以及有限的智能驾驶场景,普遍采用905nm激光发射器+Si激光探测器+转镜/MEMS扫描方案;
-长期来看性能更加优异且可适应更多智能驾驶场景需求的1550nm激光发射器+InGaAs激光探测器+纯固态及FMCW扫描方案。
-目前国内车型搭载的激光雷达,扫描方式基本都采用转镜方案,激光发射器采用905nm和1550nm都有。
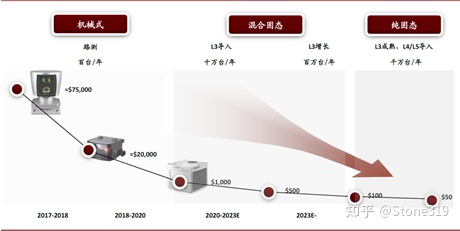
激光雷达价格趋势(来源网络)
国内车型激光雷达应用情况(来源网络)