 大飙车
大飙车
辅助驾驶(智驾)已经成为现在的标配,首先必须明确一个认知:辅助驾驶目前仅仅是辅助驾驶,绝不能代替人类开车。 那么在目前状态下,辅助驾驶究竟谁行谁不行呢?各种路线、方案是什么情况?特斯拉到底是不是国内怂包、国外无敌呢?今天就来聊一聊!
两种硬件技术路线
目前市面上的智驾方案根据硬件架构和对地图的依赖程度,分为两大技术派系。
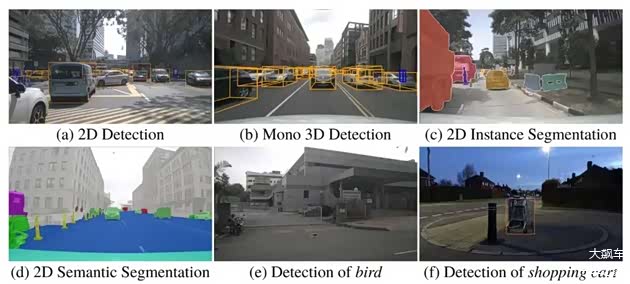
1. 融合感知:以华为ADS为代表。它们通过激光雷达、毫米波雷达与摄像头的冗余配合,为系统提供一层“物理护盾”。

在黑夜、大雨或强光逆光等视觉容易“致盲”的极端环境下,激光雷达提供的厘米级三维测距能守住安全下限。
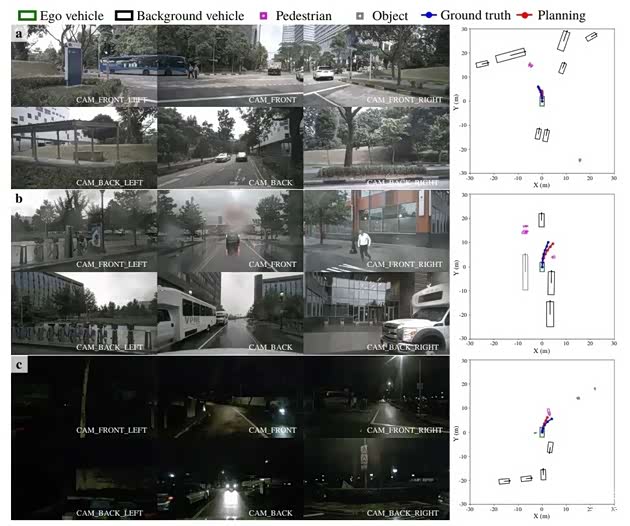
2. 纯视觉:以特斯拉FSD以及小鹏最新的“鹰眼”方案为代表。这一流派主张完全模仿人类双眼,通过海量数据训练神经网络来“脑补”深度信息。

虽然这种方案在硬件成本上更低,且因为具备极高的语义捕捉潜力(读懂路牌、交警手势)而被认为拥有更高的技术上限(上限指的不是安全,而是信息密度);但安全下限的保障极度依赖于云端数据计算中心的规模化训练与海量数据的实时闭环。
小鹏VLA模型是什么?
在智驾大模型领域,目前形成了两条逻辑截然不同的进化路径,物理直觉WA(World Action)和认知推理VLA(Vision-Language-Action)。

小鹏、理想为代表的一些品牌,使用的就是VLA大模型,路径非常简单,模型计算中心会实时标定视频每一帧画面中出现的内容信息,然后将画面转换成文字描述,模型会根据文字描述生成下一步指令,最后将指令下发到车辆电脑,完成车辆的动作操作。

VLA的最大好处是大模型不需要告诉车具体怎么躲,无需做人工标定,而是让车学会自主思考,完成一系列动作。这是一个厚积薄发的过程,虽然起步极难,但一旦“开窍”,表现将远超人类。
VLA最大的问题是不依赖于云端模型数据规模量和质量,而且必须依赖更强大的车机硬件芯片,以及绝对低延时的网络通讯状态,因为海量视频数据都需要转换成文字描述信息,一旦硬件运算能力不足,网络延时高,那么车辆动作就会滞后。要知道,高速行驶的汽车,每一秒的误判都会造成重大交通事故,是对生命的严峻挑战!

这就是为什么理想、小鹏,不仅要放弃低效率的英伟达,采用自研运算芯片,而且还要对VLA进行本地大模型部署,就是为了降低对网络通讯的高度依赖。
特斯拉与华为,是一套模型?
华为一直认为VLA方案是“投机取巧”,因为图像转换文字描述的过程中,不仅多了一道运算,而且必然会有细节信息的遗漏,造成不可估计的后果。

华为认为开车应是“肌肉记忆”,追求极速物理反应,所以需要省去了语言中介。所以从ASD4.0开始,华为直接宣布绝不走VLA路线,而是坚持 WA(World Action)物理直觉,世界行为模型。这就是马斯克所说的“第一性原理”,所以特斯拉FSD也是WA模型,当然还包括蔚来。
简单来说,WA模型更像是黑盒操作,模型的学习过程叫 “自监督学习” (Self-supervised Learning),主要是玩“预测未来”的游戏,没有动作指令的专有代码行。核心步骤有三:
第一步:看电影。把海量的驾驶视频,喂给云端超算。
第二步:做填空。AI会遮住视频的下一帧,然后自己猜:“根据现在的路况,下一秒前车会往哪走?我的车该在哪?”
第三步:对答案。AI把自己猜的结果和真实的下一帧视频对比。如果猜错了(比如它觉得应该加速,但视频里老司机刹车了),它就自动调整自己内部的神经元权重。
这就是“学习”的过程: 循环往复几亿次后,它就掌握了物理世界的运行规律。这就不再需要工程师去标定参数,而是AI在大数据中自动找到了最优参数。
为了防止模型不会学坏,只能变成“老司机”,AI会自动选择那些驾驶分高、没有事故、动作平顺的“老司机”视频作为教科书,也就是“黄金样本”。如果视频里出现了急刹车、碰撞或人工接管,AI 会标记为“负面样本”,避免学习。
此外华为和特斯拉一样,都是通过模型蒸馏出一个子模型,直接OTA到车机系统中,出生就是满级选手,不需要后天的系统学习,并且完全是本地部署,本地响应,可以完全摆脱对于网络的依赖。

另外,华为和特斯拉一样,都会在后台另外部署一套备份安全系统。华为叫做CAS4.0,如果AI判断失误,那么CAS4.0系统读取雷达信息物理级别纠错,避免碰撞风险。特斯拉则是使用双AI芯片,使用另外一颗AI芯片监督正在工作的AI芯片,是否出现判断错误。
总之,WA的“学习”本质上是从“逻辑驱动”变成了“数据驱动”。华为和特斯拉之所以强,不是因为他们工程师写代码快,而是因为他们家里的“算力中心”大、喂给 AI 的“高质量视频”多。
到底行不行!
说了半天,那么目前市场上已知的这些智能辅助驾驶技术,到底行不行!
1.华为智驾:就目前来看,老练且领先,华为依然是目前顶级的存在,“端到端”不仅是口号,更体现在极高的博弈上限和系统稳定性。凭借雄厚的经济实力和“堆人、堆算力”的状态,华为实现了感知与规控的深度闭环。它的智驾在窄路博弈、复杂环岛等场景下的表现最为稳健,是目前公认的第一梯队。

2.小鹏:小鹏正在经历从“融合感知”向“纯视觉”的剧变。虽然取消了激光雷达,但凭借在 VLA 大模型上的厚积薄发,小鹏在处理城市复杂路口、长尾场景时的智能化程度正迅速提升。它证明了通过正确的方向选择,可以抛弃冗余硬件,实现更高效的智能。

3.比亚迪:虽然比亚迪车卖得便宜、销量高,但在高阶智驾算法上仍有很长的路要走。比亚迪需要在产品研发和算法迭代上投入更多精力,才能跟上脚步。

4.特斯拉:与华为一样,都是WA模型方案。虽然特斯拉在国外表现惊人,但因为中国市场受限于数据出境、地图法规等客观环境,FSD的实际体验与国内头部梯队相比有不小的差距。在没有针对中国路况进行本土化打磨之前,6.4万元的FSD选装包在现阶段性价比不高。
总结
现阶段智驾是辅助而非替代,责任始终在人,切勿以命试险。由于多种模型方案,多种技术路线并行发展,使得目前智驾正经历智能手机初期的“参差不齐”,随着算力的增强与技术的成熟,L3/L4 级的辅助驾驶终将像手机一样普惠大众,成为汽车的基础配置。



评论(0)