 未来汽车Daily
未来汽车Daily
头图来源 | 网络
作者 | 苏鹏
置身于极为内卷的市场,智能驾驶在水面上极速狂飙。但在水面以下,无论是消费者还是开发者,都面对着难以避开的暗礁:
车企为提升感知精度不断增加传感器数量,却仍难避免长尾场景的决策失准;
消费者面对 “突然减速”“莫名换道” 的智驾操作,始终无法建立信任;
开发者困于 “模型训练-场景测试-车载部署” 的割裂流程,技术落地周期动辄以年计算。

来源:英伟达
这也让智能驾驶行业陷入 “感知堆料内卷、决策黑盒难解、落地效率低下” 的三重困局。
而这背后的困境在于,智能驾驶的核心矛盾,早已从 “能否感知” 升级为 “能否可靠决策”。
为此,英伟达围绕 “决策透明化、安全冗余化、部署轻量化” 三大痛点,构建起层层递进的技术闭环。而在全栈解决方案中,开源 VLA 模型家族Alpamayo、兼顾智能安全和性能的双栈架构DRIVE AV、以及支持LLM 和视觉语言模型(VLM)推理的开源 C++ 框架TensorRT Edge-LLM是本次CES期间发布的全新解决方案。
1、NVIDIA Alpamayo:打破决策黑盒的技术革命
Alpamayo,我们更愿意将其称之为VLA 模型撕开决策黑盒的第一道裂口。
为什么这么说?
黄仁勋如此强调Alpamayo的核心:“让自动驾驶系统会思考、能解释”。
传统智驾则存在着“决策不可解释” 的黑盒困境。因为这些解决方案极其依赖模块化拼接与规则硬编码,面对潮汐车道、施工改道等长尾场景时,时常会有决策失准或退出接管的问题,且无法追溯逻辑,最终成为商业化落地的最大障碍。
对此,Alpamayo则给出一套不同的解题思路,直接用 “视觉编码器 - 文本编码器 - 轨迹解码器” 的三级架构打破僵局。
其不仅实现端到端推理,更通过自然语言同步输出操作逻辑,例如解释 “换道因前方车辆减速”“减速因施工区域预警” 等关键决策逻辑,让系统操作具备可追溯性。
作为一套完整解决方案,Alpamayo并未止步于模型本身,而是同步配套仿真工具与专属数据集,依托Halos安全系统的算法安全层,可高精度复现暴雨货车侧翻、无保护左转行人横穿等百万公里级罕见场景。
该模型系列包含开源AI模型、仿真工具和数据集,可加速基于推理的、安全的自动驾驶车辆开发。
2、DRIVE AV 软件:让智能驾驶更拟人化
决策透明化的前提是绝对安全,NVIDIA DRIVE AV为 VLA 模型的落地提供全栈安全支撑。
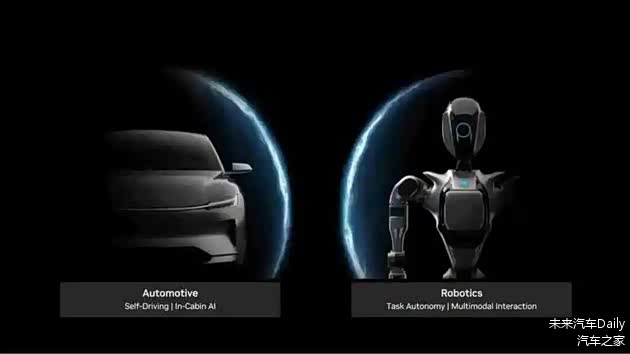
来源:英伟达
NVIDIA DRIVE AV采用AI端到端技术栈实现核心驾驶控制,这款 L2++的软件平台核心亮点集中在双芯片冗余设计与长时预测能力。
车辆可从真实及合成驾驶数据中学习,以类人决策能力应对复杂驾驶场景,内置冗余及故障安全机制保障行程可靠,Halos确保车辆在安全参数内运行。
3、TensorRT Edge-LLM:加速大模型上车的重要引擎
这是一个用于 LLM 和视觉语言模型(VLM)推理的新型开源 C++ 框架,旨在满足日益增长的高性能边缘端推理需求。
通过高性能C++推理运行库,可实现千亿参数级LLM与VLM在Jetson、DRIVE等边缘平台的高效部署。
与此同时,其精简轻量化的设计专注于嵌入式场景的特定功能,还能够显著降低框架的资源占用。
CES 2026的技术发布,彰显了英伟达在智能驾驶领域的全栈优势。
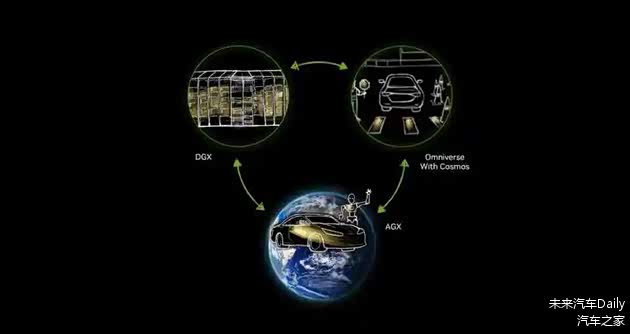
来源:英伟达
尾声:
从Alpamayo 撕开决策黑盒,到 DRIVE AV变得更拟人化,再到 TensorRT Edge-LLM 打通部署链路,配合 DRIVE AGX 的算力支撑、Halos 的安全防护与全生命周期生态的效率赋能,英伟达构建起 “模型-软件-硬件-生态” 的完整闭环。
目前,Lucid、捷豹路虎、Uber 和伯克利 DeepDrive 等移动出行领域的领先企业和业界专家展现了对 Alpamayo 的极高关注,希望开发基于推理的自动驾驶堆栈,以实现 L4 级自动驾驶。
当然,我们也可以从华尔街的投资人的动作中窥探出英伟达技术的预期:
黄仁勋关于物理AI这一概念的主题演讲点燃了分析师的热情,各大投行纷纷上调预期,65位分析师中有59位给予买入/强烈买入评级,给予的平均目标价显示未来一年上涨空间达33%。许多分析师据此认为:英伟达正以从“云端AI” 为主的增长曲线,延伸出面向“物理AI”的第二增长曲线。
2026 年作为 VLA 技术落地元年,英伟达的技术突破已按下行业 “快进键”,但产业竞争不会就此终结。特斯拉的路线反击、中国车企的本地化突围、初创公司的技术创新,都将成为技术发展的关键助推力量。
智驾行业的 “战国时代” 正在落幕,但新的博弈才刚刚开始,最终谁能掌控产业未来,仍需在技术落地与市场验证中见分晓。




评论(0)